


요꼬가와는 1915년 창립이래 계측, 제어, 정보기술을 축으로
최첨단의 제품을 산업계에 제공함으로써 사회 발전에 공헌해오고 있습니다.
제품기초지식
Clarke 변환과 Park 변환을 사용한 영구자석 동기모터(PMSM)의 직교 좌표계 dq-축 파라미터 계산: 정밀 전력 분석기 및 파형 측정기 고속 연산 함수 활용

 WP_WT5000_dqCalc-01EN_r2_K.pdf (1.5 MB)
WP_WT5000_dqCalc-01EN_r2_K.pdf (1.5 MB)
1. 소개
영구자석 동기모터(PMSM)는 유도 모터보다 손실이 적고 효율이 높은 모터로, 에너지 절약 성능이 중요한 분야에서 널리 사용됩니다. 이 모터는 에어컨, 냉장고에서부터 전 세계적으로 환경 보존을 위한 EV(전기차)까지 다양한 분야에서 사용됩니다. 일반적으로 PMSM 제어는 직교 좌표계인 dq-축 파라미터를 사용하여 수행됩니다. 삼상 교류 전류를 직교 좌표계인 αβ-축 좌표계(클락 변환)로 변환한 후, 다시 직교 좌표계인 dq-축 좌표계(파크 변환)로 변환하여 얻은 dq-축 파라미터는 직류처럼 취급할 수 있습니다. 이를 통해 PMSM 제어가 훨씬 용이해집니다.
요꼬가와 WT5000 정밀 전력 분석기와 DL950 ScopeCorder는 전기적 각도를 측정하는 기능을 갖추고 있습니다. 이 기능은 PMSM의 dq-축 파라미터를 계산하는데 사용될 수 있습니다.
다음 섹션에서는 WT5000과 DL950을 사용하여 dq-축 파라 미터를 계산하는 방법과 실제 측정 결과에 대해 설명합니다.
2. 직교 좌표계 dq-축 파라미터
다음 조건은 직교 좌표계에 대해 가정된 것입니다.
• 자기 플럭스 분포는 사인파 형태를 따른다.
• 철 손실은 무시된다.
• 삼상 교류의 고조파 성분은 무시된다.
클락 변환과 파크 변환을 통해 얻어진 직교 좌표계의 벡터 다이어그램은 아래와 같습니다.
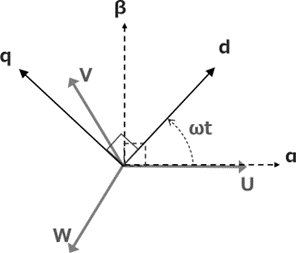
그림 1. 클락 변환과 파크 변환을 통해 얻어진 직교 좌표계의 벡터 다이어그램
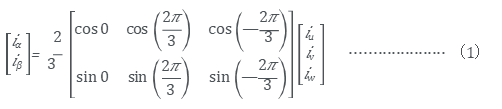
먼저, 대칭 삼상 교류를 αβ-축 좌표계로 변환하는 것(클락변환)을 고려합니다. 삼상 전류 iu, iv, iw가 αβ-축 좌표계에서 α-축이 u-상 전류와 일치하도록 표현될 때, 전류 iα와 iβ는 식 (1)과 같이 표현 됩니다.
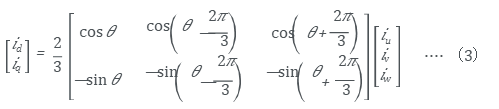
위의 행렬 방정식에서 2/3 계수는 상대 변환을 기준으로 한 계수이며, 이는 변환 전후에 상전류의 진폭이 불변임을 의미 합니다. 즉, 순간 전력이 불변인 절대 변환의 경우 계수는 2/3이 됩니다. 여기서는 상대 변환을 기준으로 변환을 수행합니다. αβ-축 좌표계에서 θ [rad]만큼 이동한 좌표를 dq-축 좌표계로 간주하면, 그 변환 행렬은 식 (2)와 같이 표현됩니다.

위의 (1)과 (2)에서, dq-축 좌표계에서 id와 iq는 식 (3)과 같이 표현됩니다.
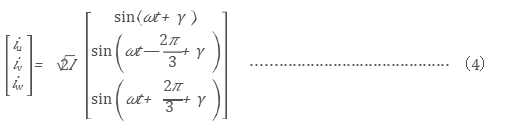
여기서, 삼상 교류는 식 (4)로 나타냅니다. I는 상전류의 RMS 값이고, γ는 u-상 전류 Iu가 d-축에서 γ [rad] 만큼 선행함을 나타냅니다.
αβ-축 좌표계에서 선행 회전각 θ [rad]를 ωt (θ = ωt)로 두고, 식 (3)과 (4)를 풀면, 식 (5)가 도출됩니다.

식 (5)에서 알 수 있듯이, dq-축 좌표계에서 전류는 직류 (DC) 입니다. 전기자 전류 벡터의 q-축에서 선행 회전각을 β [rad]라고 두면, γ = β + π/2가 도출됩니다. 이를 식 (5)에 대입하면 식 (6)이 되며, (절대 변환의 경우 계수는 

비슷하게 전기자 전압 벡터의 q-축에서 선행 위상을 δ [rad]라고 두면, V는 u-상 전압의 RMS 값이며, 전압 ?d와 ?q는 식 (7)과 같이 표현됩니다 (전류와 마찬가지로, 절대 변환의 경우 계수는 

β는 q-축과 u-상 전압 사이의 위상 차이이고, δ는 q-축과 u-상 전류 사이의 전기적 각도입니다. 이 값들을 측정하여 dq-축 파라미터를 얻을 수 있습니다.
위에서 dq-축 좌표계에서 전압 방정식은 다음과 같이 표현됩니다.

Ra: armature 권선 저항 [Ω]
p = d/dt : 미분 연산자
Ld, Lq: dq-축 인덕턴스 [H]
Ta: V/ω, 영구자석에 의해 생성된 dq-축 시스템의 전기자 상호 연계 자기 플럭스
(V: 무부하 역기전력(BEMF) 전압의 기본 파형 값)
ω: 2πf (f: 전압 및 전류 주파수)
모터가 정상 상태에서 작동한다고 가정하면 미분 연산자 조건을 무시할 수 있으며, 그 결과는 그림 2와 같은 벡터 다이어그램이 됩니다.
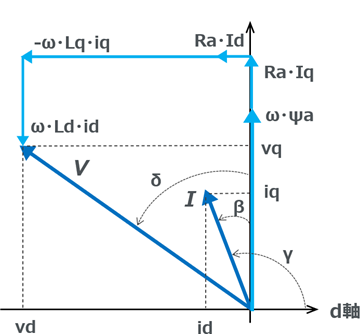
그림 2. PMSM의 벡터 다이어그램
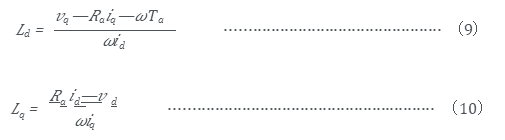
그럼 다음 방정식에서 dq-축 인덕턴스 Ld와 Lq를 구할 수 있습니다.
3. 전기적 각도 측정의 원리와 절차
3-1. 전기적 각도의 측정 원리와 보정
WT5000의 모터 평가 기능(옵션)을 사용하여 인코더의 Z-상 신호의 하강 엣지부터 전압 또는 전류 파형의 전기적 각도를 측정하기 위해 1주기 또는 8주기 FFT 계산을 수행합니다. 그 결과, Z-상 신호의 하강 엣지에서 전압 또는 전류의 기본 파형 의 상승 엣지 제로 교차점까지의 위상 차이가 계산됩니다. 이 FFT 계산에서 얻어진 위상 각도는 전기적 각도로 표시됩니다.
여기서 전기적 각도는 Z-상 신호의 하강 엣지가 전압 또는 전류 파형의 상승 엣지 제로 교차점과 일치할 때 0°로 설정 됩니다. WT5000은 Z-상 신호의 하강 엣지와 전기적 각도 0°가 모터 장착 위치로 인해 일치하지 않을 경우, 측정된 전기적 각도에서 Z-상 신호의 차이를 빼는 보정 기능을 제공합니다.
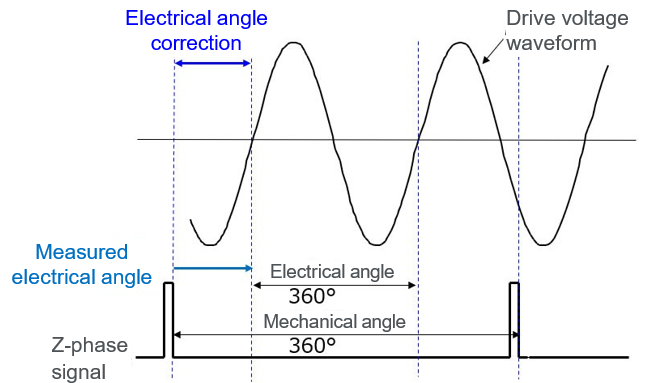
그림 3. 전기적 각도 측정 및 보정
3-2. 무부하 역기전력(BEMF) 전압 및 인코더 측정
dq-축 파라미터를 측정하기 전에,모터를 부하 측에서 회전시켜 생성된 전압, 즉 무부하 역기전력(BEMF) 전압을 측정하고, 무부하 BEMF 전압의 기본 성분을 회전 속도 ω로 나누어 전기자 상호 연계 자기 플럭스 Ta를 구해야 합니다. 이 무부하 BEMF 전압 측정에서 측정된 전기적 각도는 q-축과 Z-상 신호 사이의 위상 차이를 포함하고 있으며, 이를 다음과 같이 보정해야 합니다.
삼상 삼선(3P3W) 또는 삼상 전압 삼상 전류(3V3A) 시스템에서 전압 측면만 연결합니다. 이 경우, 전기적 각도 보정 값이 전압 배선 시스템에 따라 달라지므로, WT5000에 권장된 배선 시스템을 사용하여 배선해야 합니다.
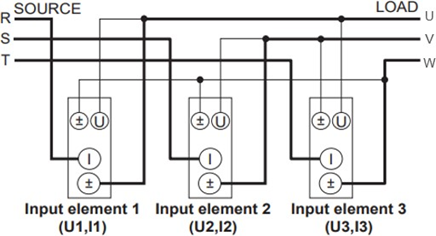
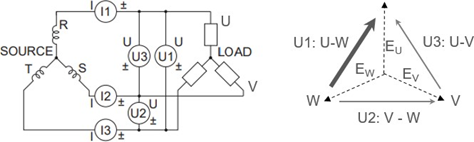
그림 4. WT5000의 삼상 전압 삼상 전류 배선 시스템
인코더의 A, B, Z 상 신호를 각각 모터 평가 기능의 B, C, D 터미널(BNC)에 연결합니다. 모터를 부하 측에서 회전시키고 Z-상 신호와 전압 U1 사이의 전기적 각도 EaM1U1을 측정합니다. 전기적 각도 값에는 회전 변동을 포함한 변동이 있으므로, 여러 번 측정하여 평균 값을 취하는 것이 좋습니다(지수 평균 함수 사용 가능).전기적 각도 및 기타 파라미터는 나중에 인버터 에서 부하가 적용된 상태로 모터가 회전하는 동일한 회전 속도 에서 측정하는 것이 바람직합니다. 또한, dq-축 파라미터를 측정할 때와 동일한 방향으로 회전 방향이 설정되어 있는지 확인해야 합니다.
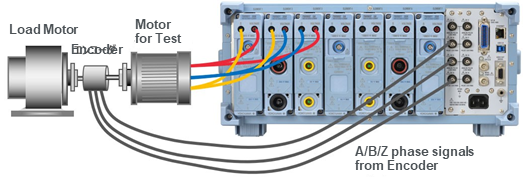
그림 5. 무부하 역기전력(BEMF) 전압 측정
3-3. Z-상 신호와 모터 위치 간의 보정
위에서 얻은 전기적 각도는 Z-상 신호의 하강 엣지에서 무부하 역기전력(BEMF) 전압 U1(즉, u-w 상선간 전압)의 기본 파형의 상승 엣지 제로 교차점까지의 위상 차이입니다. 이는 원래 요구되는 Z-상 신호와 q-축 사이의 위상 차이와 다릅니다.
따라서 전기적 각도 보정 기능을 사용하여 보정을 수행합니다. 보정 방정식은 다음과 같으며, 여기서 θ는 측정된 전기적 각도의 값을 나타냅니다.

보정 방정식은 다음과 같으며, 여기서 θ는 측정된 전기적 각도의 값을 나타냅니다.
무부하 BEMF 전압 파형의 제로 교차점에서 하강 엣지 제로 교차점까지의 보정입니다. 그러나 WT5000 사양에 따라 전기적 각도 보정 셀의 입력 값 범위는 ±180° 내에 있기 때문에, Z-상 신호와 무부하 BEMF 전압 파형 사이의 위상 차이 관계에 따라 전기적 각도 측정값의 부호가 변경됩니다. 두 번째 항인 +90°는 q-축 위치가 무부하 BEMF 전압의 하강 엣지에서 90° 차이가 나기 위한 보정입니다. 마지막 항인 +30°는 q-축이 상선간 전압이 아니라 u-상 전압의 위상이므로, 배선된 선간 전압 측정을 위상 전압으로 변경하기 위한 위상 차이입니다. 이는 2장 "직교 좌표계 dq-축 파라미터"에서 이미 언급한 바 있습니다. 위상 차이는 Z-상 신호에 대해 왼쪽(지연)에 있을 때는 양수(+) 값으로, 오른쪽(선행)에 있을 때는 음수(-) 값으로 시간 축에서 표현된다는 점을 유의해야 합니다.
위 보정 결과는 전기적 각도 보정 값 프레임에 입력됩니다.
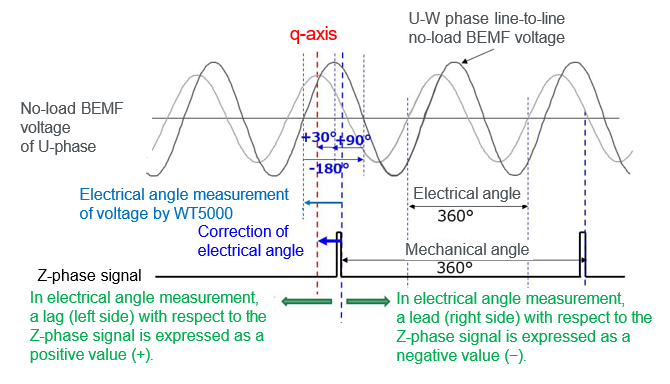
그림 6. WT5000 배선 시스템을 사용하여 무부하 BEMF 전압 측정으로 전기적 각도 보정
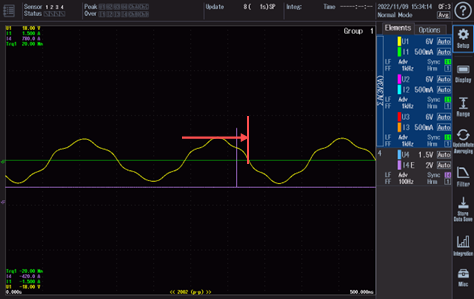
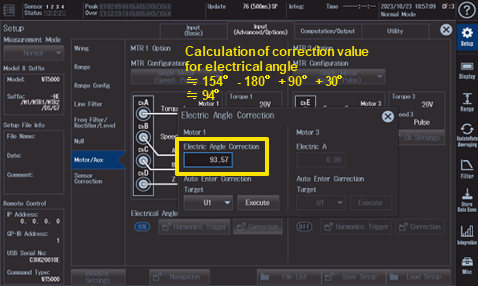
그림 7. WT5000에서 전기적 각도 측정 및 보정 (Z-상 신호의 파형은 CH4로 관찰됨)
3-4. 동기 전기자 권선 저항 측정
dq-축 파라미터 계산에 필요한 전기자 권선 저항 Ra는 디지털 멀티미터(DMM)를 사용하여 4단자 방법으로 DC 저항으로 측정하여 얻습니다. 모터 작동 중 온도 변화에 대한 보정을 수행하는 것이 바람직합니다.
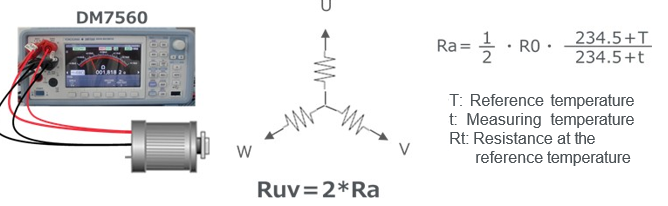
그림 8. 전기자 권선 저항 측정 및 온도 보정
4. 직교 좌표계 dq-축 파라미터 계산 예
아래는 WT5000의 사용자 정의 기능을 사용한 계산 예시입니다. 이 표현식은 상대 변환을 기반으로 합니다. 절대 변환의 경우, F7과 F8의 ?d 및 ?q의 계수는 1이며, F9와 F10의 id 및 iq의 계수는
 입니다. 3상 4선(3P4W) 시스템으로 dq-축 파라미터를 측정할 때는 섹션 3 "전기 각도 측정의 원리와 절차"에서 전기 각도 보정식의 +30°를 삭제하고 전기 각도를 측정한 후, F5의 위상 차
입니다. 3상 4선(3P4W) 시스템으로 dq-축 파라미터를 측정할 때는 섹션 3 "전기 각도 측정의 원리와 절차"에서 전기 각도 보정식의 +30°를 삭제하고 전기 각도를 측정한 후, F5의 위상 차
보정 값 +30°를 삭제하고 F7과 F8의 계수를
 로 설정하여 파라미터 계산을 진행합니다.
로 설정하여 파라미터 계산을 진행합니다.
3상 4선 시스템으로 dq-축 파라미터 를 측정하고 절대 변환을 사용할 때는 섹션 3 "전기 각도 측정의 원리와 절차"에서 전기 각도 보정식의 +30°를 삭제하고 전기 각도 를 측정한 후, 위상 차 보정값을 삭제합니다.
F5에서 값 +30°를 삭제하고, F7과 F8의 계수를 3으로 설정 하며, F9와 F10의 id 및 iq 계수를  로 설정하여 파라미터 계산을 진행합니다.
로 설정하여 파라미터 계산을 진행합니다.
< 상대 변환 & 3상 3선 >
F1 “Pole/2”,””,”(number of pole pairs)”
F2 “Ra”,”Ohm”,”(armature winding resistance)”
F3 “Psi_a”,”Wb”,”(armature interlinkage magnetic flux)“ F4 “omega_e”,”rad/s”,”F1()*2*3.14159*Speed(M1)/60”
F5 “delta”,”deg”,”EAM1U(E1)‐90+30”
F6 “beta”,”deg”,”EAM1I(E1)‐90”
F7 “vd”,”V”,”SQRT(2/3)*NEG(Ufnd(E1)*SIN(F5()))”
F8 “vq”,”V”,”SQRT(2/3)*Ufnd(E1)*COS(F5())”
F9 “id”,”A”,”SQRT(2)*NEG(Ifnd(E1)*SIN(F6()))”
F10 “iq”,”A”,”SQRT(2)*(Ifnd(E1)*COS(F6()))”
F11 “Ld”,”H”,”(F8()‐F2()*F10()‐F4()*F3())/(F4()*F9())”
F12 “Lq”,”H”,”(F2()*F9()‐F7())/(F4()*F10())”
< 상대변환 & 3상 4선 >
(상대 변환 & 3상 3선의 경우에서의 변화만 나열됩니다..)
F5 “delta”,”deg”,”EAM1U(E1)‐90”
F7 “vd”,”V”,"SQRT(2)*NEG(Ufnd(E1)*SIN(F5()))”
F8 “vq”,”V”,”SQRT(2)*Ufnd(E1)*COS(F5())”
< 절대변환& 3상 3선 >
(상대 변환 & 3상 3선의 경우에서의 변화만 나열됩니다..)
F7 “vd”,”V”,”NEG(Ufnd(E1)*SIN(F5()))”
F8 “vq”,”V”,”Ufnd(E1)*COS(F5())”
F9 “id”,”A”,”SQRT(3)*NEG(Ifnd(E1)*SIN(F6()))”
F10 “iq”,”A”,”SQRT(3)*(Ifnd(E1)*COS(F6()))”
< 절대변환 & 3상 4선 >
(상대 변환 & 3상 3선의 경우에서의 변화만 나열됩니다..)
F5 “delta”,”deg”,”EAM1U(E1)‐90”
F7 “vd”,”V”,”SQRT(3)*NEG(Ufnd(E1)*SIN(F5()))”
F8 “vq”,”V”,”SQRT(3)*Ufnd(E1)*COS(F5())”
F9 “id”,”A”,”SQRT(3)*NEG(Ifnd(E1)*SIN(F6()))”
F10 “iq”,”A”,”SQRT(3)*(Ifnd(E1)*COS(F6()))”
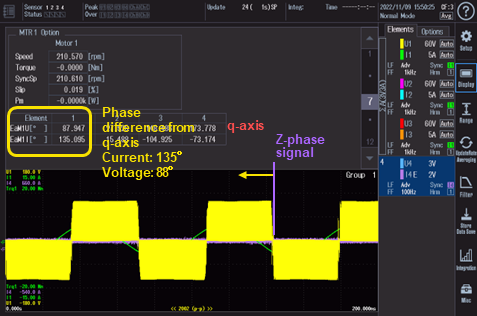
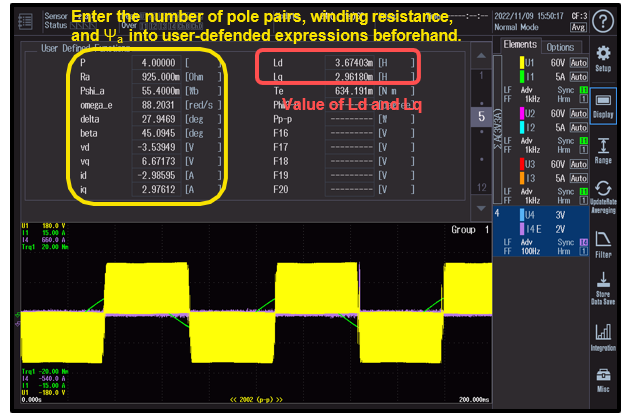
그림 9. WT5000에서의 dq-축 파라미터 측정
(Z-상 신호의 파형은 CH4로 관찰됨)
5. 전기 각도 측정 주의사항 (WT5000)
5-1. 추천 설정
1) FFT 포인트의 수
전기 각도 측정은 고조파 측정 기능을 사용하여 실행됩니다. 측정 주기가 윈도우 폭(파수)에 따라 증가하므로, 고조파 분석에서 FFT 포인트 수를 1024(윈도우 폭: 1파)로 설정하는 것이 권장됩니다. 그러나 전기 각도 측정에서 변동이 인버터 캐리어 주파수와 모터 구동 주파수(기본 주파수)에 따라 클 수 있습니다. 이 경우, FFT 포인트 수를 8192(윈도우 폭: 8파)로 변경하여 측정을 수행한 후, 더 안정적인 결과를 제공하는 FFT 포인트 수로 다시 측정을 실행하십시오.
2) 주파수 필터
WT5000의 고조파 측정 기능은 PLL 시스템을 사용합니다. 따라서 PLL 소스 신호의 정확하고 안정적인 주기 감지가 중요 합니다. PLL 소스 신호에 대해 주파수 필터를 켜면 불필요 한 신호가 제거되어 더 정확한 주기 감지가 가능합니다. 컷오프 주파수는 인버터 스위칭 주파수의 약 1/10로 설정하는 것이 권장됩니다.
3) 라인 필터 (알리아싱 방지 필터)
WT5000에는 여러 가지 라인 필터가 있습니다. 샘플링 정리에 기반하여 알리아싱을 피하기 위해 반소알리아싱 필터를 켜야 합니다. 정상 측정 및 고조파 측정 모두에 효과적인 1 MHz의 컷오프 주파수를 가진 아날로그 필터를 켜세요. 고조파 측정을 위한 디지털 필터로는 인버터의 기본 주파수의 약 100배에 해당하는 컷오프 주파수를 설정하는 것이 권장됩니다.
그러나 컷오프 주파수는 라인 필터가 측정에 직접 영향을 미치므로 조정이 필요합니다. 모터가 인버터에서 회전하고 부하가 적용된 상태에서 측정할 때, 무부하 BEMF 전압 측정에 사용된 것과 다른 컷오프 주파수를 사용하면 전기 각도 측정 결과가 달라질 수 있습니다. 컷오프 주파수는 무부하 BEMF 전압 측정과 측정 시 동일해야 합니다.
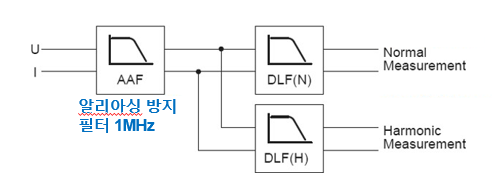
그림 10. WT5000에 포함된 라인 필터
4) 펄스 노이즈 필터
이 필터는 인코더에서 A-, B-, Z-상 신호를 측정할 때 발생하는 노이즈의 영향을 줄일 수 있습니다. 인버터의 캐리어 주파수 노이즈를 제거하면서 전기 각도를 측정할 수 있는 주파수로 약 100 kHz의 컷오프 주파수가 권장됩니다.
라인 필터와 마찬가지로, 모터가 인버터에서 회전하고 부하가 적용된 상태에서 측정할 때, 무부하 BEMF 전압 측정에 사용된 컷오프 주파수와 다른 주파수를 사용하면 전기 각도 측정 결과가 달라질 수 있습니다. 컷오프 주파수는 무부하 BEMF 전압 측정과 측정 시 동일해야 합니다.
5-2. 삼상 배선 시스템의 차이
앞서 섹션 2 "직교 좌표계 dq-축 파라미터"에서 언급한 바와 같이, ?d와 ?q는 상전압의 진폭과 위상에서 결정됩니다. 그러나 일반적으로 모터에서 중성선을 뽑을 수 없기 때문에 상전압을 직접 측정하는 것은 불가능합니다.
위 문제를 해결할 수 있는 세 가지 방법이 있습니다.
위의 방법들은 모두 모터가 불균형일 때 위상 전압을 정확하게 측정할 수 없으며, 서로 특별히 더 나은 방법이 없습니다. 이 논문에서는 일반적으로 사용되는 3V3A 배선으로 선간 전압을 측정한 후, dq-축 매개변수를 계산하였습니다.특히, 측정 대상의 실제 상황이 2장 "직교 좌표계 dq-축 매개변수"에 설명된 가정과 크게 다를 경우, 측정 결과는 이론적 값과 차이가 날 수 있습니다.
6. 고속 파형 계산을 이용한 dq-축 매개변수 계산
앞서 언급한 바와 같이, WT5000을 사용하면 측정값은 데이터 업데이트 주기(약 100ms에서 20초 사이) 동안의 평균값입니다. 여기서는 고속 파형 계산 기능을 갖춘 DL950 ScopeCorder를 사용하여 직교 좌표계 dq-축 매개변수를 구함으로써 더 순간적인 변화를 포착합니다. 이 경우, dq-축 매개변수는 2장 "직교 좌표계 dq-축 매개 변수"에 설명된 행렬 방정식을 DL950의 사용자 정의 연산 기능인 파형 MATH 함수에 입력하여 얻을 수 있습니다. 회전 속도는 엔코더의 회전 속도 신호인 A-, B-, Z-위상을 실시간 연산 함수에 입력하여 계산됩니다.
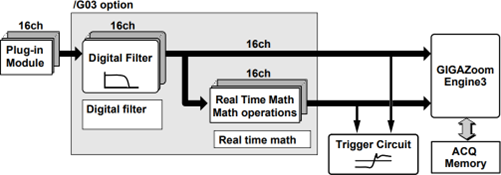 그림 11. DL950 리얼타임 연산
그림 11. DL950 리얼타임 연산
위에서 언급한 바와 같이, 2장 "직교 좌표계 dq-축 매개변수 "에서 계산된 행렬 방정식을 풀어 얻은 전압과 전류에 대한 방정식이 사용됩니다. MATH 파형 계산을 위한 계수로서 극쌍 수, 전기자 권선 저항, 전기자 상호 연계 자기 플럭스 등의 등록 상수를 미리 설정합니다. Z-위상 신호와 q-축 간의 보정은 측정된 파형과 파형 계산 결과를 바탕으로 Z-위상 신호와 q-축 간의 위상 차이를 오프셋 값으로 설정하여 수행됩니다. 선간 전압에서 위상 전압으로의 변환은 행렬 방정식에서 위상 차이를 보정하여 계산됩니다.
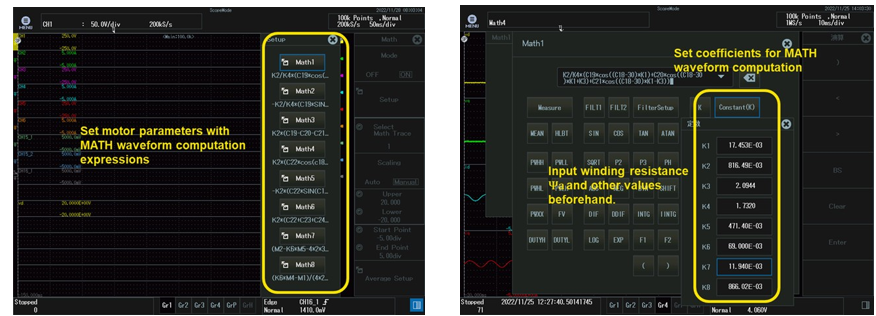
그림 12. DL950에서 dq-축 매개변수와 계수 설정 (사용자 정의 연산)
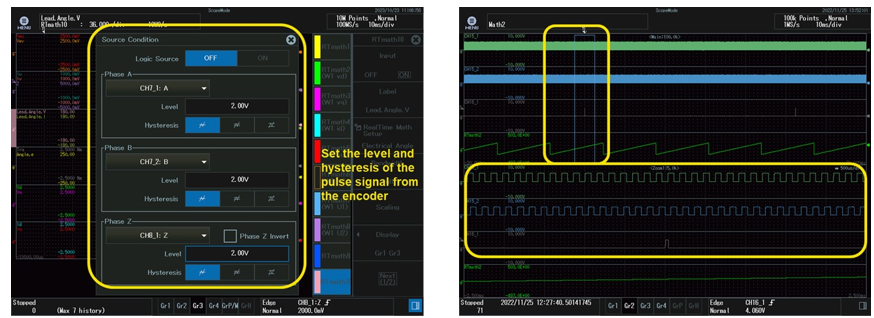
그림 13. DL950에서 A-, B-, Z-위상 신호 측정 설정 및 측정 예시
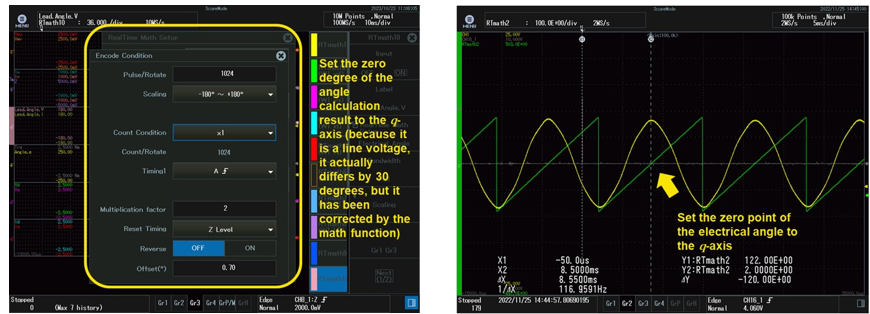
그림 14. DL950에서 전기 각도 보정 설정 및 전기 각도 측정 예시
 그림 15. DL950에서 dq-축 매개변수 측정 예시 (파형 및 수치 값)
그림 15. DL950에서 dq-축 매개변수 측정 예시 (파형 및 수치 값)
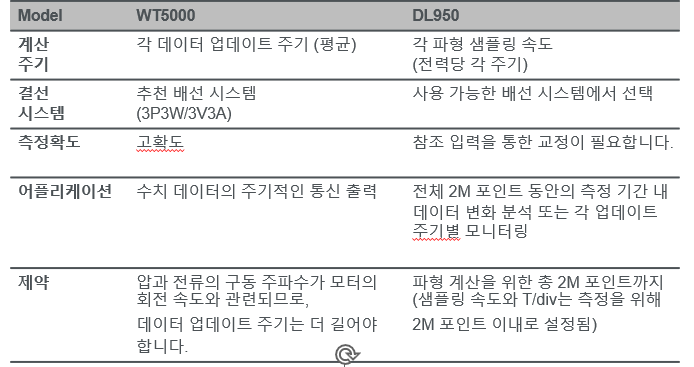
그림 15에 표시된 것처럼, dq-축 매개변수는 전압, 전류, 위상 차이의 각 순간 측정 데이터(샘플링 데이터)에 대해 계산되어 파형으로 표시됩니다. 또한, 커서1과 커서2를 하나의 모터 회전의 시작과 끝에 설정하면 dq-축 매개변수가 수치 값으로 표시됩니다. 표 1은 WT5000과 DL950 간의 dq-축 매개변수 측정 차이를 보여줍니다.
표 1. WT5000과 DL950 간의 dq-축 매개변수 측정 차이
7. 결론
이 논문에서는 WT5000과 DL950의 기능을 사용하여 PMSM의 전기 각도를 측정하고 직교 좌표계 dq-축 매개변수를 계산하는 방법을 설명하였습니다. 모터 제어를 위해 id와 iq는 엔코더로 측정된 회전 각도, 전류 및 전압을 바탕으로 결정되며, 선간 전압은 모터가 요구된 회전 속도와 토크를 생성하도록 제어 됩니다. 따라서 WT5000을 사용한 시간 평균 dq-축 매개변수 계산과 DL950을 사용한 실시간 매개변수 계산은 PMSM 개발 및 제어에 있어 매우 효과적인 방법으로 간주됩니다.
이 논문에서는 이미 장비에 포함된 기능을 사용하여 dq-축 매개변수를 계산하였습니다. 우리는 현장 엔지니어들의 요구 를 충족시키기 위해 측정 정확도, 실시간 성능 및 조작성을 향상시키는 새로운 기능과 측정 방법을 계속해서 제공할 것입니다.
참고문헌 :
Morimoto, S., & Sanada, M. (2013) Drive System for Energy Saving Electric Motors. Japan: Kagakujyoho shuppan Co., Ltd.
Morimoto, S., Takeda Y., & Hirasa T. (1993). Parameter Measurement of PM Motor in dq Equivalent Circuit. IEEJ Transactions on Industry Applications, 113-D (11), 1330-1331.
WT5000 Precision Power Analyzer

- • 세계 최고 수준의 전력 정확도
DL950 ScopeCorder
IS8000 Integrated Software Platform
하단영역
한국요꼬가와전기(주)
사업자등록번호 102-81-17301
경기도 용인시 기흥구 기흥로 58-1 기흥 ICT밸리 SK V1 A동 407호 ~ 411호 (우) 16976 (분당선 기흥역 2번 출구 500m)
T&M 영업본부 : 02-2628-3813
서비스팀 :02-2628-3872
팩스 : 02-2628-3899
COPYRIGHT ⓒ 2024 YOKOGAWA ELECTRIC CORPORATION. ALL RIGHTS RESERVED.